The Technology of Wunderland's Carsytem
How do our cars moves?

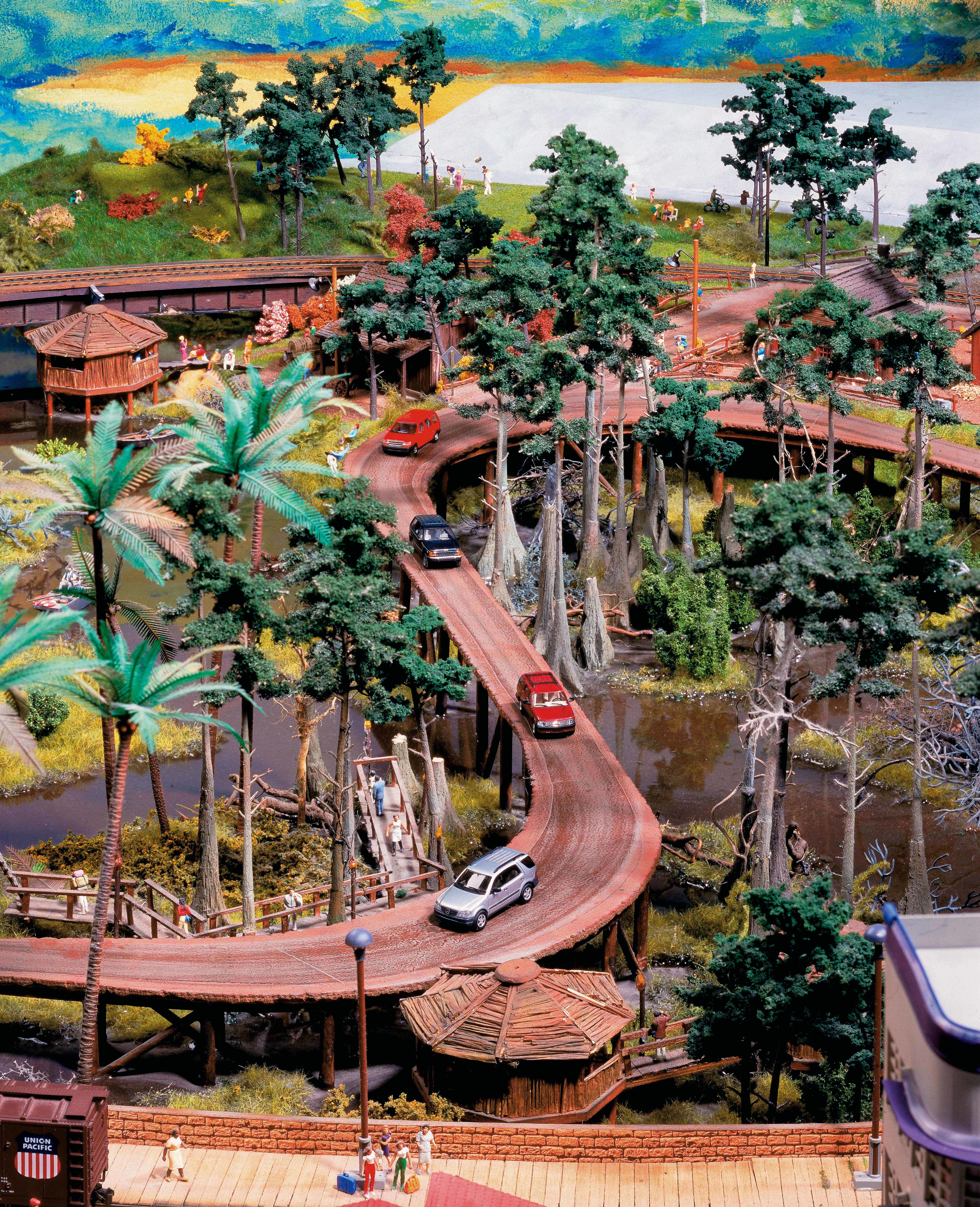
Back in 2000, when the idea of the Miniatur Wunderland was born, our desire to extend the existing Faller Carsystem by combining it with a computer-controlled system played a vital role. It works by a principle that is as simple as it is ingenious: A magnet built into the front axle of the car and wires laid in the streets let the cars steer and follow the lane.
First thought of as a supplement to the train layout, the control software turned out to be a whole project on its own, consuming 2,500 hours of work until the inauguration. Between August 2001 and 2007, further enhancements used up at least an additional 3,500 working hours. Also, the vehicle building (heavily under-estimated in the beginning) took us another 2,000 working hours.
We didn’t want the control software to follow a fixed sequence of steps, but rather provide each vehicle with a "brain". The system, as it is now, would allow for 65,000 vehicles. However, for computing power reasons, a maximum of "only" 1,000 vehicles is realistic for the Wunderland layout.
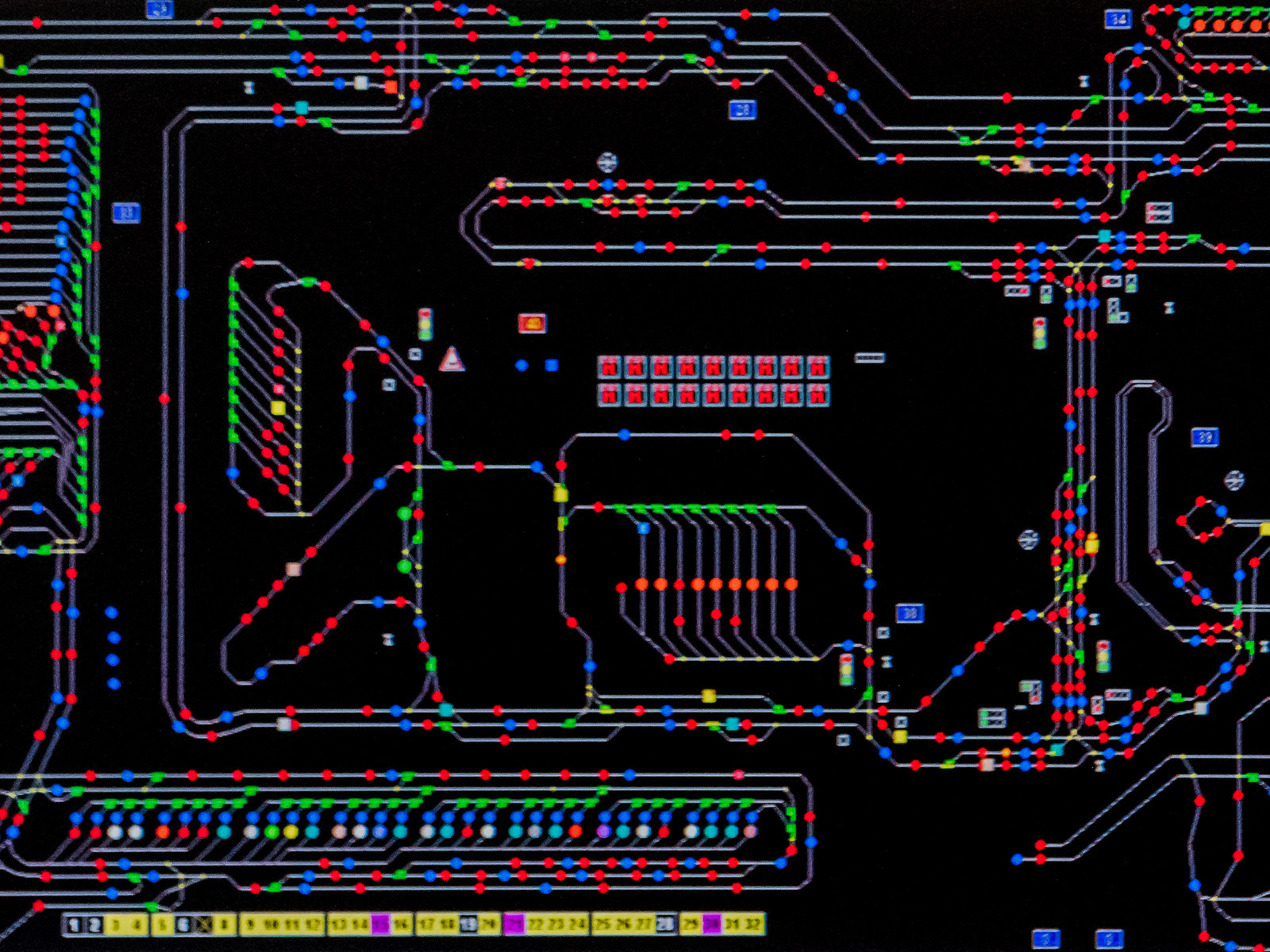
The basic data for the streets comprises roughly 12,000 parameters for Knuffingen and about 14,000 for the USA section, such as: streets (with dimensions accurate to the millimeter), gradients, curve radiuses, right of way, traffic lights (complex, endless lights control with turning cars, green wave traffic flow, day and night mode, etc.), grade crossings, turnouts, occupancy detection, radar traps, red light violation cameras, speed measurement, vehicle type permissions, and many, many more. The complex processes at the airport even required 50,000 parameters (all entered manually!).
Facts and figures at a glance
- Total distance driven by cars (real km!): 1.546.900 km
- Number of fire fighting scenarios: 940.000
- Total length of the Carsystem: 1,6 Kilometer
- Number of cars caught by radar trap in Knuffingen: ca. 1.030.000
Currently, the program has one process for each car that computes all its options 20 times per second. Vehicles can just drive around, have a fixed destination, can be limited to a certain route (i.e. buses or garbarge trucks), or be on their way to an incident (fire fighters, oversized heavy transporters). For each vehicle, not only its exact location has to be determined but also its next options, such als: catching up to another car, approaching a crossing (with or without right of way regulation), entering the highway (relatively complicated, since another car already driving on the highway might have to be informed to change lanes, in case it hasn't noticed for itself yet), recharching the battery, etc.
A vehicle, resp. the computer program, decides at every branch which way to go by checking various criteria: Is the new route permitted for the type of car? Does it lead eventually to the car's destination? (Imagine virtual “roadsigns” at every crossing.) Is the route free, or at least free enough so that the car wouldn’t have to stop if it selected that route? Is there no fire fighting operation blocking the street? (Should this be the case, the vehicle checks other routes and also, if the detour is permitted for its type of vehicle).
Should there be more than one route fulfilling all criteria, the vehicle picks one route at random under consideration of pre-defined probabilities (i.e., a truck seldom enters residential areas). Once the vehicle selected a route, it checks if a turn signal has to be set or if stopping is required. (If a car has to stop on a highway, hazard warning lights start blinking automatically.) If there are no obstacles whatsoever, the vehicle enters the street and drives on with the speed defined for this route.
Our vehicles always check the right of way, yield to the highway rule of preferably driving on the right lane, stop at closed raillway crossing gates, obey traffic lights, grant the right of way to firefighters in operation, and stop at pedestrian crossings. If stuck in a traffic jam, they might let a car from a side street sneak in, and they also wait patiently behind garbage trucks with frequent stops. However, once in a while, a car gets caught in a radar trap because of speeding and subsequently is stopped by the police.
Buses make scheduled stops and at night, all vehicles turn on the headlights. They are switched off again at dawn, except for the Scandinavian layout. In the German section, about 10% of the cars run with headlights turned on at daytime, too – also controlled at random. (Note: A day/night-cycle is simulated every 15 minutes using computer controlled dimmable fluorescent lamps, located at the ceiling and behind the layout.)
Apart from the daily individual traffic, we put a strong emphasis on pre-defined scenarios in our car system. Mostly, these would be fire fighting ooerations, but once in a while, you may also see streets being blocked off because of an oversized heavy truck with police escort passing by.
What happens when fire breaks out?

When smoke starts coming out of the windows of one of Knuffingen’s houses and the first flames are visible, the alarm goes off at the town’s fire station. Even in the middle of the night, the lights inside the station will be switched on and only seconds later, the first fire engines will turn on their headlights, flashing blue lights and headlight flashers.
The fire brigade, consisting of up to five vehicles, will head for the location of the fire. Up to 34 vehicles rush to the site one after another in case of a red alert situation, depending on the size of a fire. If the fire gets out of control, fire engines from the suburbs are called for support.
Discover more Technical Topics







Straight to your digital mailbox
Easily receive news, offers & interesting information.
Ich bin damit einverstanden, dass die Miniatur Wunderland Hamburg GmbH meine personenbezogenen Daten verarbeitet, um mich per E-Mail über Neuigkeiten aus der Welt des Miniatur Wunderlands zu informieren. Diese Einwilligung ist jederzeit widerrufbar. Informationen zum Datenschutz sind hier abrufbar.